Andreas Koch und Peter Mandl (Hrsg.) (2003): Multi-Agenten-Systeme in der
Geographie.
Institut für Geographie und Regionalforschung der Universität Klagenfurt.
Klagenfurter Geographische Schriften, Heft 23.
Multi-Agenten-Simulation und Raum –
Spielwiese oder tragfähiger Modellierungsansatz
in der Geographie?
Peter Mandl, Klagenfurt
Zusammenfassung
Die
Erstellung räumlich expliziter Modelle und damit ausgearbeiteter
Simulationsstudien wird seit Erfindung des Computers unter dem Namen der
„Locational oder Spatial Analysis“ in der Geographie betrieben. Der
durchschlagende Erfolg dieses Forschungsansatzes ist aber in den letzten
Jahrzehnten ausgeblieben. Drei mögliche Gründe dafür werden im ersten Teil
dieses Artikels diskutiert. Da ist zuerst die unzureichende
Repräsentationsgenauigkeit der vorhandenen Modelle für die zu bearbeitenden
geographischen Systeme oder Fragestellungen. Es werden gängige geographische
Modellansätze auf diesen Vorwurf hin kritisch betrachtet. Der zweite Grund ist
die mangelnde Benutzbarkeit bestehender Modellansätze aufgrund fehlender oder
schwer bedienbarer Programme. Warum die seit etwa 15 Jahren verwendeten
Geographischen Informationssysteme dieses Manko nicht beheben konnten, wird im
zweiten Abschnitt untersucht. Der dritte Grund ist die fehlende
Interoperabilität aller vorhandenen geographischen Softwarewerkzeuge, Daten und
Verarbeitungsprozeduren.
Im zweiten Teil des Artikels werden Multi-Agenten-Systeme und deren
Realisierung in lauffähigen Beispiel-Modellen vorgestellt. Die besprochenen
Modelle wurden von Studierenden programmiert und werden in einer Typisierung,
in räumliche und zeitliche Auflösungsklassen unterteilt, präsentiert.
Abschließend wird resümiert und es werden einige Ausblicke auf sinnvolle
Entwicklungen gegeben, damit in den nächsten Jahren Simulationen mit
Multi-Agenten-Systemen (Multi-Agenten-Simulationen) zu einem tragfähigen Modellierungsansatz
in der Geographie werden können.
Die in Abschnitt 5 des Artikels besprochenen Beispielmodelle sind als Applets
der, diesen Band ergänzenden Internetseite (http://multiagentensysteme.uni-klu.ac.at
oder kurz mas.uni-klu.ac.at) zu
entnehmen.
Schlüsselbegriffe: Multi-Agenten-Systeme,
Spatial Analysis, GIS, geographische Modelle, Geo-Simulation, räumlich
explitite Multi-Agenten-Systeme, Typisierung von Multi-Agenten-Systemen,
Interoperabilität
Links im Text
(15.4.2004)
·
PCRaster: http://www.geog.uu.nl/pcraster/
·
SimuMap (Pullar 2004): http://www.geosp.uq.edu.au/projects/mapscript/
·
Java Modelle von Ginger Booth: http://www.gingerbooth.com/courseware/
·
Die Waldsimulation „Woods“: http://www.cbc.yale.edu/courseware/woods.html
·
online Zeitschrift JASSS, Journal of Artificial
Societies and Social Simulation: http://jasss.soc.surrey.ac.uk/JASSS.html
·
Leigh Tesfatsion’s “Agent-Based Computational
Economics (ACE) and Complex Adaptive Systems”: http://www.econ.iastate.edu/tesfatsi/
·
Programm StarLogo Version 2.0.1: http://education.mit.edu/starlogo/
·
Seminar Geoinformatik zur Agentenbasierten
Modellierung (Wintersemester 1999/2000 an
der Universität Münster): http://ifgitest.uni-muenster.de/4_studium/ws99-00/Mandl_agenten/Agentenseminar.html
·
Agentenbasierte Modellierung in der Geographie (Wintersemester
2002/03 an der Universität Klagenfurt): http://www.uni-klu.ac.at/geo/lv_online/abm2002.html
·
Dirk Helbing (Institut für Wirtschaft und Verkehr an der TU
Dresden): http://www.helbing.org
·
Illés Farkas (Biophysikalische Institut der
Eötvös-Universität Budapest): http://angel.elte.hu/~panic/
·
Simulation von Paniksituationen (Java Applets):
http://angel.elte.hu/~panic/
·
Center for Advanced Spatial Analysis am
University College London, CASA, http://www.casa.ucl.ac.uk/
·
Sugarscape-Model: http://www.brook.edu/es/dynamics/sugarscape/default.htm
·
RBSim, Recreation
Behavior Simulator: http://www.srnr.arizona.edu/~gimblett/rbsim.html
·
„AgentSheets“ (graphische Entwicklungs-Umgebung zur
Erzeugung von regelgesteuerten MAS): http://www.agentsheets.com
Beispiele von Multi-Agent-Systemen (Applets erzeugt
mit StarLogo 2.0.1)
Nehmen wir ein einfaches, oft gezeigtes Beispiel für ein
MAS her. Es handelt sich um das Modell einer Termitenpopulation, die Holzspäne
auf einen Haufen zusammenträgt, also eine Verhaltenssimulation aus der
Biologie. In Abbildung 1 ist das System mit dem MA-Programm StarLogo realisiert.
Die Umwelt des Systems besteht aus
fiktiven, diskreten Elementen (schwarze Rasterzellen), die passiven Objekte sind die Holzspäne (gelbe
Zellen, sog. Patches), die Termiten werden durch die aktiven Agenten des Systems repräsentiert, als Relationen
erkennen die Termiten die Holzspäne und tragen diese davon, als Operationen werden Holzspäne gesucht,
transportiert und auf einem freien Platz neben anderen Holzspänen abgelegt und
die emergente Struktur ist die
Haufenbildung, die bei jedem Simulationslauf, zwar mit unterschiedlicher
Geschwindigkeit und Lage, aber doch verlässlich auftritt.
Applet: http://mas.uni-klu.ac.at/slogo/termites.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/termites.slogo
Das erste Beispiel „Panik
mit Hindernis“, programmiert von Sascha Tegtmeyer und Alexander Starke im WS 2001/02
in Münster (Abb. 2) ist die Simulation einer Notfallsituation („Emergency“-Simulation),
bei der man die Möglichkeit hat, in einer geschlossenen Räumlichkeit mit einer
frei wählbaren Anzahl von Personen, die sich zufallsgesteuert bewegen, eine
Paniksituation auszulösen, während der alle Personen so schnell wie möglich den
Raum durch einen einzigen Ausgang verlassen wollen. Dort ist, zur Ableitung des
entstehenden Drucks, eine Säule oder ein anderes festes Hindernis aufgestellt,
das beliebig in Form und Größe verändert werden kann. Die Simulation dient
dazu, die Effekte solcher Hindernisse experimentell zu erproben und eventuelle
emergente Strukturen zu erkennen und zu erforschen.
Applet: http://mas.uni-klu.ac.at/slogo/Panik
mit Hindernis.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Panik
mit Hindernis.slogo
Das zweite Beispiel „Garagensimulation“, programmiert von Harald Borsutzky und Theodor Förster im WS 2001/02 in Münster (Abb. 3) ist die Simulation der Verkehrssituation in einer Parkgarage im Verlauf mehrerer Stunden. Man hat die Möglichkeit die Dichte der einfahrenden Fahrzeuge und die Aufenthaltszeit für zwei Verhaltenstypen von Fahrern (Kurz- und Langparker) einzustellen. Je nach Parametereinstellung entstehen während der Simulation emergente Strukturen, wie etwa zwischenzeitliche Wellen ausfahrender PKW, wenn die Langparker noch vor der völligen Füllung der Garage ihre eingestellte Parkzeit erreicht haben und sukzessive die Garage verlassen. Mit solchen einfachen Modellen, die leicht an die Raumverhältnisse einer konkreten Garage angepasst werden können und in denen man gewisse Vorrang- oder andere Verkehrsregeln implementieren kann, lassen sich naturgetreue Simulationen durchführen, die viele praktische Fragestellungen beantworten können (z.B. beste Einbahnregelung, Erprobung eines Leitsystems, Notfallsituationen).
Applet: http://mas.uni-klu.ac.at/slogo/Garagensimulation.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Garagensimulation.slogo
Das dritte Beispiel
„Kreisverkehr“, programmiert von Konrad Stark im WS 2002/03 in Klagenfurt (Abb. 4) ist
die Simulation der Verkehrssituation in einem Kreisverkehr. Man muss vor der
Simulation die Anzahl der Fahrzeuge aus jeder der vier Richtungen,
untergliedert nach den drei möglichen Fahrtrichtung (links, gerade oder rechts)
festlegen. Die Reihung der Fahrzeuge und die Wahl ihrer Abstände erfolgt
zufällig (in einem sinnvollen Rahmen). Für jedes Fahrzeug wird die Fahrzeit
protokolliert und der Durchschnitt aller Fahrzeiten wird graphisch dargestellt
(Diagramm in den beiden rechten Bildern von Abb. 4). Die beiden oberen Bilder
in Abbildung 4 zeigen den Start (links) und den Zustand der Simulation bei
einem Kreisverkehr mit Vorrang der im Kreis befindlichen Fahrzeuge nach einiger
Zeit (rechts). Man sieht, dass die durchschnittlichen Durchfahrtszeiten für
alle Richtungen etwa gleich sind. Es entstehen trotzdem keine allzu langen
Warteschlangen. Anders ist die Situation, wenn man den Fahrzeugen im Kreis den
Vorrang nimmt, so wie das die Straßenverkehrsordnung noch vor einigen Jahren in
Österreich vorschrieb. Die beiden unteren Bilder in Abbildung 4 zeigen die
Situation wieder am Beginn der Simulation (links) und nach einiger Zeit
(rechts). Wenn man nur einen der 12 Anzahlregler etwas zu hoch einstellt - hier
sind es 60 von 100 möglichen PKW aus Süden, die nach links wollen - dann gibt
es unweigerlich eine Verkehrsblockade (deadlock) im Kreisverkehr. Das Modell
bzw. eine passende Erweiterung davon kann dazu dienen, die Effekte von
Verkehrsregelungsmaßnahmen zu untersuchen. Das könnte dann zu neuen
Ampelphasenlängen o.ä. führen.
Applet: http://mas.uni-klu.ac.at/slogo/Kreisverkehr.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Kreisverkehr.slogo
und
Applet: http://mas.uni-klu.ac.at/slogo/Kreisverkehr
mit umgekehrtem Vorrang.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Kreisverkehr mit umgekehrtem Vorrang.slogo
Das vierte Beispiel
„Autobahn“, programmiert von Dominik Grüning und Patrick Tomberge im WS 2001/02 in
Münster (Abb. 5) zeigt die Simulation des Verkehrs auf einem Autobahnstück. Die
Funktionen des Programms werden in der zugehörigen Dokumentation folgendermaßen
beschrieben:
Die Umwelt zeigt einen 3-spurigen Autobahnabschnitt, auf dem sich die Fahrzeuge vom linken Bildrand zum Rechten bewegen und dabei, unter bestimmten Bedingungen, einen Spurwechsel vollziehen. Man muss anfangs die Anzahl der PKW auf der untersten Spur bestimmen. In Abhängigkeit der Anzahl von Autos auf der untersten Spur werden die oberen Spuren besetzt. Mit den weiteren Reglern kann man das Beschleunigungs- und Bremsverhalten der Autos beeinflussen. Dieses ist auch während der Laufzeit möglich.
Jeder Agent (PKW) besitzt 3 Eigenschaften:
- die momentane Geschwindigkeit,
- die empfohlene Geschwindigkeit und
- die Höchstgeschwindigkeit der jeweiligen Fahrbahn.
Vor allem haben wir uns darauf konzentriert, das Wechseln der Fahrbahnen
möglichst gut zu implementieren. Dabei lässt sich die empfohlene
Geschwindigkeit und die Höchstgeschwindigkeit von der benutzen Fahrbahn
ableiten. Die PKW der untersten Spur versuchen eine Geschwindigkeit von 0.03 zu
erreichen, die Höchstgeschwindigkeit liegt bei 0.04. Wenn diese überschritten
wird, wechseln die Autos auf der unteren Spur auf die mittlere. Ähnlich verhält
es sich auch für die Autos auf der mittleren und oberen Spur. Auf der mittleren
Spur kann es aber auch sein, dass die Autos auf die untere Bahn wechseln, wenn
deren Geschwindigkeit zu gering ist. Wenn die Geschwindigkeit der Autos auf der
oberen Spur zu gering wird, wechseln diese auf die Mittlere.
Des weiteren schauen die Fahrer in der Simulation auch "in den
Rückspiegel". Damit ist gemeint, dass ein Fahrzeug die Felder hinter sich
(bzw. vor sich ) abfragt und darauf nach gewissen Regeln abhängig von den
zugewiesenen Eigenschaften reagiert. So wechseln die Autos auf der unteren Spur
die Fahrbahn, wenn die Gefahr besteht, dass sie auf den "Vordermann"
stoßen könnten. Die langsameren Autos wechseln hingegen auf eine Spur tiefer,
wenn sich ein schnelleres Auto von hinten nähert. Es kann auch manchmal
vorkommen, dass Autos sich bei Spurwechsel kreuzen. Daraus können Unfälle
resultieren.
Das Modell kann leicht durch die Berücksichtigung weiter Eigenschaften der Fahrer (Fahrstil, unterschiedliche Reaktionen auf Ereignisse), Verkehrsbeschränkungen oder Regeln aus der Straßenverkehrsordnung erweitert werden. Es ist auch denkbar als Umwelt nicht ein fixes Straßenstück, sondern die Umgebung eines PKW, also eine sich fortbewegende Umwelt, zu realisieren, womit man quasi die Autobahnfahrt aus der Sichtweise eines Autofahrers simulieren kann.
Applet: http://mas.uni-klu.ac.at/slogo/Autobahn.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Autobahn.slogo
Das fünfte Beispiel
„Waldbrand“, als Einstiegsbeispiel zum Seminar im WS 2001/02 in Münster von
Studierenden während der Lehrveranstaltung programmiert (Abb. 6), ist die
Simulation der Feuerausbreitung während eines Waldbrandes. Solch ein System
kann nach einer Einführung von etwa zwei Unterrichtsstunden von
programmierkundigen Studierenden in kurzer Zeit mit StarLogo erstellt werden.
Die Aufgabe war, ausgehend von einem
oder mehreren Punkten in der Landschaft eine Feuerausbreitung nach allen
Richtungen gleichmäßig, beschränkt auf brennbare Objekte zu programmieren. Das
Bild links oben in Abbildung 6 zeigt so ein Programmergebnis (grüne Zellen sind brennbares Material, rote Zellen sind in Brand befindlich
und graue Zellen stellen den
abgebrannten Wald dar), wobei hier von Hand sogar mehrere Ausgangspunkte
gewählt wurden und das Programm ohne Änderungen funktioniert. In Erweiterung der Grundaufgabe, konnten
die Studierenden das Modell ausbauen. Das Bild rechts oben in Abbildung 6 zeigt
eine solche Erweiterung zur Berücksichtigung von Wind, mit zu wählender Richtung und Stärke (hier sind die brennende
Zellen in gelb und die abgebrannten
Flächen in orange eingefärbt). Es
trat bei diesem Modell, durch die Programmlogik bedingt, ein Effekt der
zunehmenden Breite der Feuerfront mit wachsendem Abstand zum Ausgangspunkt ein.
Das ist kein natürliches emergentes Verhalten des Systems, sondern wird durch
die zufallsgesteuerte Wahl der Ausbreitungsrichtungen der Brandagenten
innerhalb eines 45 Grad Sektors verursacht, ein Effekt, der durchaus ein
sinnvolles Verhalten des Modells repräsentiert. Außerdem kann die Windrichtung
bei laufender Simulation geändert werden! Die beiden unteren Bilder in Abbildung
6 zeigen eine Modellerweiterung unter zusätzlicher Berücksichtigung unterschiedlicher „Brennmaterialien“. Von einem
frei wählbaren Punkt ausgehend (oranger
Punkt im Bild links unten in Abb. 6), bewegt sich die Feuerfront nur auf Weiden
und im Wald (und das noch unterschiedlich schnell) fort.
Applet: http://mas.uni-klu.ac.at/slogo/Waldbrand
ohne Wind.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Waldbrand
ohne Wind.slogo
und
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Waldbrand
mit Wind.slogo
sowie
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Waldbrand
in einer Landschaft.slogo
Das sechste Beispiel „MAS
Almbeweidung“, programmiert von Johannes Dieringer und David Melcher im WS 2002/03 in
Klagenfurt (Abb. 7) ist die Simulation von räumlichen Vegetations-Verteilungen,
die durch die Beweidung von Almflächen im Laufe der Zeit (Tage und Wochen)
entstehen. Angeregt wurde das Model durch einen Artikel von Judith Drapela, Gregory Egger, Michael Jungmeier u.A. (1999), in dem ein räumlich differenziertes
GIS-Modell zur Simulation der almwirtschaftlichen Nutzung in einem Probegebiet
mit einem top down Ansatz vorgestellt wird. Das MAS Almbeweidung ist ein
erster, bei weitem noch nicht vollständiger Versuch, diesen Ansatz bottom up
nachzuvollziehen. In Abbildung 7 sind einige Zustandsbilder mehrerer
Simulationsläufe wiedergegeben. Die beiden Bilder in der oberen Reihe zeigen
die Startkonfiguration der Umwelt für einen Simulationslauf, links nur die passiven
Objekte (hellgrün: ursprüngliche
Almwiese, dunkelgrün: Wald, beige: Sträucher und grau: vegetationslose Felsflächen) und
rechts auch die Agenten (45 braune
Kühe und 24 weisse Schafe). Im Bild
in der Mitte links beginnen die Tiere das Gras und die Schafe auch die
Sträucher zu fressen (gelb:
abgeweidetete Flächen) ohne dass das Gras nachwächst, was im Bild in der Mitte
rechts dazu kommt (lichtes hellgrün:
nachgewachsene Wiese). Die beiden unteren Bilder zeigen die
Vegetationssituation in fortgeschrittenen Simulationstadien für zwei andere
Szenarien (links: 40 Kühe und 54 Schafe, rechts: 50 Kühe und 50 Schafe).
Außerdem wird bei zwei unterschiedlichen Simulationsläufen nicht immer zu den
gleichen Zeitpunkten die Graswuchs-Funktion aktiviert, weil dies manuell
passiert. Bei den Ergebnisbildern fällt sofort die Empfindlichkeit des Modells
gegenüber solchen kleinen Variationen der Parameter auf. Die emergenten
Strukturen unterscheiden sich auffällig in der Größe der abgefressenen und noch
nicht nachgewachsenen Wiesenflächen Das bedeutet, dass beim praktischen Einsatz
solcher Modelle die Eichung der
Parameter auf die zu untersuchenden Systeme, z.B. durch Berücksichtigung
empirischer Daten, ein entscheidender Faktor für die Brauchbarkeit der
Simulationsprojekte ist (vgl dazu Abschnitt „3.3
Die Aufgaben der Geo-Simulation“ in Mandl 2000).
Applet: http://mas.uni-klu.ac.at/slogo/MAS
Almbeweidung neu.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/MAS
Almbeweidung neu.slogo
Das siebente Beispiel
„Trampelpfade“, programmiert von Andreas Martmann und Christian Brüske im WS 2001/02
in Münster (Abb. 8) ist die Simulation der Entstehung und des Verlaufes von
Trampelpfaden, die Fußgänger auf einer freien Fläche hinterlassen. Angeregt
wurde das Model durch einen Artikel von Dirk Helbing
u.A. in der Zeitschrift Nature, die 1997 über das Thema „Entstehung von
Abkürzungswegen in Grünflächen, Ursachen und Modellierung“ eine Theorie und ein
Computerprogramm entwickelten. Das Beispiel in Abbildung 8 zeigt nun zwei
zeitlich auseinander liegende Phasen der Entstehung eines sehr einfachen
Trampelpfadsystems. Man kann einige Parameter einstellen (Anzahl der Fußgänger,
Trittstärke, Abweichung von geraden Verbindung) und dann lässt man die Leute
drauf los laufen. Es entstehen in unserem Fall sehr einfache Wegstrukturen. Man
müßte nun das Modell verfeinern, weitere Zielpunkte und Hindernisse eingeben
sowie schon vorhandene Wege berücksichtigen. Das Modell liefert die
Grundfunktionalität für solche Studien.
Applet: http://mas.uni-klu.ac.at/slogo/Trampelpfade.html
StarLogo Programm: http://mas.uni-klu.ac.at/slogo/Trampelpfade.slogo
Links zur Literatur (15.4.2004)
Drapela, J., G. Egger, M. Jungmeier, G. Grabherr, K. Reiter, H. Kirchmeier und M. Pühringer (1999): Großräumige, refernzierte Modellierung der Almwirtschaftlichen Nutzung (Beweidung) – Das Beispiel Nationalpark Hohe Tauern Tirol und Kärnten. In: In: Strobl, J., Th. Blaschke (Hrsg.)(1999): Angewandte Geographische Informationsverarbeitung XI. Herbert Wichman Verlag, Heidelberg, S. 148-159. Verfügbar von http://www.agit.at/papers/1999/drapela_FP_12.pdf
Helbing, D., I. Farkas und T. Vicsek (2000): Simulating Dynamical Features of Escape Panic. Nature 407, S.487-490. Verfügbar von http://angel.elte.hu/~panic/download/407487a0_r.pdf (Stand 20.12.2003)
Mandl, P. (2000): Geo-Simulation - Experimentieren und Problemlösen mit GIS-Modellen. In: Strobl, J., Th. Blaschke und G. Griesebner (Hrsg.)(2000): Angewandte Geographische Informationsverarbeitung XII. Herbert Wichman Verlag, Heidelberg, S. 345-356. http://www.agit.at/papers/2000/mandl_FP_12.pdf
Parker, D.C. und V. Meretsky (2002): Measuring Emergent
Properties of Agent-Based Land-Use/Land-Cover Models Using Spatial Metrics.
Review Copy submitted to Agriculture, Ecosystems, and Environment, 31 S.
Verfügbar von http://php.indiana.edu/~dawparke/modluc/emergent_metrics.pdf
(Stand 20.12.2003)
Parker, D.C., Th. Berger
und St.M. Manson (Hrsg.)(2002):
Agent-Based Models of Land-Use and Land-Cover Change. Report and Review of an
International Workshop, Oct. 4-7, 2001, Irvine, CA, 118 S. (= LUCC Report
Series No.6) Verfügbar von http://www.indiana.edu/~act/focus1/ABM_Report6.pdf
(Stand: 20.12.2003)
Pullar, D. (2004): SimuMap: a computational system for spatial modelling. In: Environmental Modelling & Software 19, S. 235-243. Verfügbar von www.sciencedirect.com (Stand: 20.12.2003)
Raynolds,
C. (1999): Individual-Based Models, an annotated list of links, Last update:
October 22, 1999. http://www.red3d.com/cwr/ibm.html
(Stand 20.12.2003)
Rötzer, F. (2000): Die Gleichung der Panik. Telepolis (2001). http://www.heise.de/tp/deutsch/inhalt/co/8810/ 1.html (Stand 20.12.2003)
Tesfatsion,
L. (2003): Software for Agent-Based Computational Economics (ACE) and Complex
Adaptive Systems, Last Updated: 21 December 2003. http://www.econ.iastate.edu/tesfatsi/acecode.htm
(Stand 20.12.2003)
Torrens, P.M. (2001): Can
geocomputation save urban simulation? Throw some agents into the mixture,
simmer, and wait ... http://www.casa.ucl.ac.uk/paper32.pdf (Stand 20.12.2003)
Anschrift des Autors (15.4.2004)
|
Ass.-Prof. Mag. Dr. Peter Mandl Institut für Geographie und Regionalforschung Universität Klagenfurt Universitätsstraße 65-67 A-9020 Klagenfurt Tel.: 0043-(0)463-2700-3216 Fax: 0043-(0)463-2700-3299 E-mail: peter.mandl@uni-klu.ac.at Homepage: http://www.uni-klu.ac.at/~pmandl/ |
|

Im Heft nur in Schwarzweiß reproduzierte Abbildungen
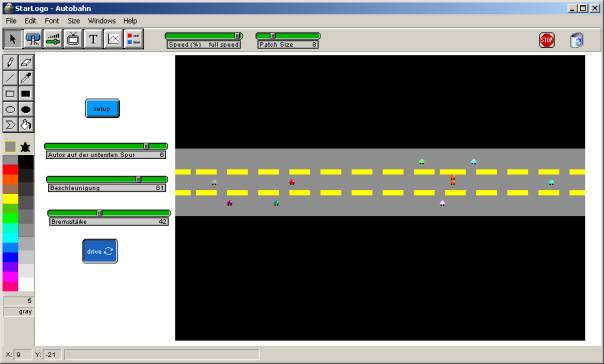
Abbildung 5: Beispiel 4 „Autobahn“,
programmiert von Dominik Grüning und Patrick Tomberge im WS 2001/02 in Münster.
Erläuterungen im Text.
Abbildung 8: Beispiel 7 „Trampelpfade“,
programmiert von Andreas Martmann und Christian Brüske im WS 2001/02 in
Münster. Erläuterungen im Text.